Quadcopter FX Simulator
3D CREATIVE WORLD
-
अपडेट किया गया
2025-06-09
-
वर्तमान वर्शन
1440946614
-
संसाधन

विवरण
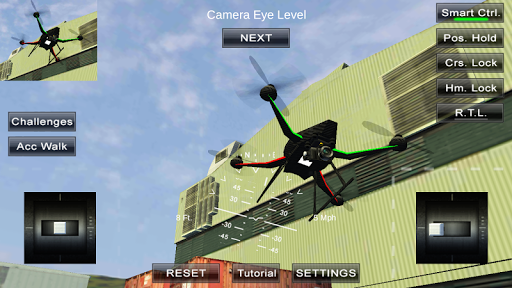
फर्स्ट पर्सन व्यू (एफपीवी), एचयूडी, रिटर्न होम, कोर्स लॉक, होम लॉक, कैमरा गिंबल, एक्रो मोड, एक्रो 3डी मोड और बहुत कुछ के साथ एक क्वाडकॉप्टर / मल्टीरोटर आरसी ड्रोन सिम्युलेटर..
अब इमर्सिव फ़्लाइंग और एफ़पीवी अनुभव के लिए Google Cardboard VR का भी इस्तेमाल किया जा सकता है.
नियंत्रकों के लिए समर्थन
कृपया ध्यान दें कि यह एक सिम्युलेटर है, गेम नहीं. यह आरसी उत्साही लोगों के लिए फ्लाइंग कौशल का अभ्यास करने के लिए डिज़ाइन किया गया है.
शुरुआती लोगों के लिए बेसिक ट्यूटोरियल उपरोक्त विवरण वीडियो में है.
कम से कम स्क्रीन रिज़ॉल्यूशन 800 x 480 px होना चाहिए. न्यूनतम अनुशंसित रैम 1 जीबी है. हम सुझावों और समस्याओं के लिए खुले हैं. आप हमें हमेशा हमारे सहायता ईमेल पर ईमेल कर सकते हैं.
विशेषताएं:
1) क्वाडकॉप्टर के वास्तविक भौतिकी मॉडल पर आधारित
2) विभिन्न कैमरा मोड का इंटरैक्टिव चयन:
* आंखों के लेवल का कैमरा
* फ़र्स्ट पर्सन व्यू कैमरा
* स्थिर जिम्बल कैमरा
* कैमरा को फ़ॉलो करें
आप उड़ते समय चारों ओर घूम सकते हैं, या तो स्क्रीन के बीच में खींचकर या आई लेवल कैमरा मोड में बाईं ओर एक्सेलेरोमीटर बटन को सक्षम करके क्वाड को देख सकते हैं..
3) स्थान पर लौटें (आरटीएल)
क्वाड पर होने पर स्वचालित रूप से वापस आ जाएगा और अपनी लैंडिंग स्थिति में वापस आ जाएगा. जब क्वाड सीमा से बाहर चला जाएगा तो यह स्वचालित रूप से चालू हो जाएगा.
4) पोजीशन होल्ड करें
जब ऑन द क्वाड दोनों कंट्रोल स्टिक जारी होने पर अपनी स्थिति को बनाए रखने की कोशिश करेगा.
5) कोर्स लॉक
जब आगे, पीछे, बाएं और दाएं क्वाड के अभिविन्यास की परवाह किए बिना समान रहेंगे. उदा. दाईं स्टिक को आगे की ओर ले जाने से क्वाड हमेशा पूर्व दिशा में आगे बढ़ेगा, भले ही वह उत्तर की ओर इशारा कर रहा हो.
6) होम लॉक
जब ऑन फॉरवर्ड हमेशा आपसे दूर रहेगा और बैकवर्ड हमेशा क्वाड ओरिएंटेशन की परवाह किए बिना आपकी ओर रहेगा.
7) हेड अप डिस्प्ले (एचयूडी)
रीयल-टाइम पिच, रोल, हेडिंग, ऊंचाई और गति प्रदर्शित करना.
8) समायोज्य नियंत्रण संवेदनशीलता सेटिंग्स
9) ऑटो स्थिरीकरण समायोज्य
10) एल्टीट्यूड होल्ड स्विच
यदि चालू है तो क्वाड स्विच ऑन होने पर ऊंचाई बनाए रखने की कोशिश करेगा.
11) बेहतर सेटिंग
सक्षम होने पर उपयोगकर्ता कुल वजन, स्टेटिक / डायनेमिक थ्रस्ट, पीआईडी सेटिंग और एयरोडायनामिक ड्रैग मान बदल सकते हैं.
12) मल्टीपल क्वाड / सीन सिलेक्शन / टाइम पास के लिए कुछ बुनियादी चुनौतियां..
13) मल्टीपल मोड इनपुट सपोर्ट.
अब यह मोड1, मोड2 को सपोर्ट करता है. मोड3, मोड4 और एक्सेलेरोमीटर. आप सेटिंग पृष्ठ के माध्यम से बदल सकते हैं
14) एफपीवी और जिम्बल कैमरे में कैमरा रोटेशन.
एफपीवी या जिम्बल कैमरे पर स्क्रीन के केंद्र से क्लिक करें और खींचें. रीसेट करने के लिए बीच में डबल क्लिक करें.
15) गतिशील हवा
इमारत के पीछे हवा का प्रभाव कम हो जाएगा.
16) इमर्सिव वर्चुअल रियलिटी और एफपीवी अनुभव के लिए गूगल कार्डबोर्ड सपोर्ट.
सुनिश्चित करें कि आपके पास डिवाइस से जुड़ा एक नियंत्रक है क्योंकि कार्डबोर्ड वीआर सक्षम होने के बाद क्वाडकॉप्टर को नियंत्रित करने का एकमात्र तरीका नियंत्रक है. सक्षम करने के बाद आपको यूआई पर बटनों को देखना होगा और इसे क्लिक करने के लिए कार्डबोर्ड पर ट्रिगर बटन को दबाना होगा. एक बार जब आप उड़ान भर रहे हों तो ट्रिगर को कहीं भी दबाने से सेटिंग पेज खुल जाएगा. आप ट्रिगर बटन दबाने के बजाय ट्रिगर इवेंट को निष्पादित करने के लिए स्क्रीन पर कहीं भी टच कर सकते हैं.
17) अधिकतम झुकाव कोण / ऑटो स्थिर संवेदनशीलता स्लाइडर
सामान्य मोड में स्लाइडर अधिकतम झुकाव कोण सेटिंग को बदल देता है। यह सेटिंग क्वाडकॉप्टर द्वारा झुकाए जाने वाले अधिकतम रोल/पिच कोण को निर्धारित करती है. स्पोर्ट्स मोड में यह ऑटो स्टेबिलाइज़ सेंसिटिविटी को बदल देता है. जितनी अधिक सेटिंग्स होंगी क्वाडकॉप्टर को स्थिर करने के लिए उतना ही अधिक बल लगाया जाएगा.
18) विशेषज्ञ उड़ान के लिए एक्रो / एक्रो 3 डी मोड
इन मोड में ऑटो स्टेबलाइज़ लागू नहीं किया जाएगा. आपको इस मोड में उड़ान भरने के लिए विशेषज्ञ होने की आवश्यकता है। 3 डी मोड में वह मोड है जिसमें क्वाडकॉप्टर उल्टा भी उड़ सकता है। केंद्र की स्थिति से नीचे ले जाने पर थ्रॉटल स्टिक रिवर्स थ्रस्ट उत्पन्न करेगी.
उड़ने का आनंद लें..
क्रेडिट: कुछ Arteria सामग्री उपयोग में है.
अब इमर्सिव फ़्लाइंग और एफ़पीवी अनुभव के लिए Google Cardboard VR का भी इस्तेमाल किया जा सकता है.
नियंत्रकों के लिए समर्थन
कृपया ध्यान दें कि यह एक सिम्युलेटर है, गेम नहीं. यह आरसी उत्साही लोगों के लिए फ्लाइंग कौशल का अभ्यास करने के लिए डिज़ाइन किया गया है.
शुरुआती लोगों के लिए बेसिक ट्यूटोरियल उपरोक्त विवरण वीडियो में है.
कम से कम स्क्रीन रिज़ॉल्यूशन 800 x 480 px होना चाहिए. न्यूनतम अनुशंसित रैम 1 जीबी है. हम सुझावों और समस्याओं के लिए खुले हैं. आप हमें हमेशा हमारे सहायता ईमेल पर ईमेल कर सकते हैं.
विशेषताएं:
1) क्वाडकॉप्टर के वास्तविक भौतिकी मॉडल पर आधारित
2) विभिन्न कैमरा मोड का इंटरैक्टिव चयन:
* आंखों के लेवल का कैमरा
* फ़र्स्ट पर्सन व्यू कैमरा
* स्थिर जिम्बल कैमरा
* कैमरा को फ़ॉलो करें
आप उड़ते समय चारों ओर घूम सकते हैं, या तो स्क्रीन के बीच में खींचकर या आई लेवल कैमरा मोड में बाईं ओर एक्सेलेरोमीटर बटन को सक्षम करके क्वाड को देख सकते हैं..
3) स्थान पर लौटें (आरटीएल)
क्वाड पर होने पर स्वचालित रूप से वापस आ जाएगा और अपनी लैंडिंग स्थिति में वापस आ जाएगा. जब क्वाड सीमा से बाहर चला जाएगा तो यह स्वचालित रूप से चालू हो जाएगा.
4) पोजीशन होल्ड करें
जब ऑन द क्वाड दोनों कंट्रोल स्टिक जारी होने पर अपनी स्थिति को बनाए रखने की कोशिश करेगा.
5) कोर्स लॉक
जब आगे, पीछे, बाएं और दाएं क्वाड के अभिविन्यास की परवाह किए बिना समान रहेंगे. उदा. दाईं स्टिक को आगे की ओर ले जाने से क्वाड हमेशा पूर्व दिशा में आगे बढ़ेगा, भले ही वह उत्तर की ओर इशारा कर रहा हो.
6) होम लॉक
जब ऑन फॉरवर्ड हमेशा आपसे दूर रहेगा और बैकवर्ड हमेशा क्वाड ओरिएंटेशन की परवाह किए बिना आपकी ओर रहेगा.
7) हेड अप डिस्प्ले (एचयूडी)
रीयल-टाइम पिच, रोल, हेडिंग, ऊंचाई और गति प्रदर्शित करना.
8) समायोज्य नियंत्रण संवेदनशीलता सेटिंग्स
9) ऑटो स्थिरीकरण समायोज्य
10) एल्टीट्यूड होल्ड स्विच
यदि चालू है तो क्वाड स्विच ऑन होने पर ऊंचाई बनाए रखने की कोशिश करेगा.
11) बेहतर सेटिंग
सक्षम होने पर उपयोगकर्ता कुल वजन, स्टेटिक / डायनेमिक थ्रस्ट, पीआईडी सेटिंग और एयरोडायनामिक ड्रैग मान बदल सकते हैं.
12) मल्टीपल क्वाड / सीन सिलेक्शन / टाइम पास के लिए कुछ बुनियादी चुनौतियां..
13) मल्टीपल मोड इनपुट सपोर्ट.
अब यह मोड1, मोड2 को सपोर्ट करता है. मोड3, मोड4 और एक्सेलेरोमीटर. आप सेटिंग पृष्ठ के माध्यम से बदल सकते हैं
14) एफपीवी और जिम्बल कैमरे में कैमरा रोटेशन.
एफपीवी या जिम्बल कैमरे पर स्क्रीन के केंद्र से क्लिक करें और खींचें. रीसेट करने के लिए बीच में डबल क्लिक करें.
15) गतिशील हवा
इमारत के पीछे हवा का प्रभाव कम हो जाएगा.
16) इमर्सिव वर्चुअल रियलिटी और एफपीवी अनुभव के लिए गूगल कार्डबोर्ड सपोर्ट.
सुनिश्चित करें कि आपके पास डिवाइस से जुड़ा एक नियंत्रक है क्योंकि कार्डबोर्ड वीआर सक्षम होने के बाद क्वाडकॉप्टर को नियंत्रित करने का एकमात्र तरीका नियंत्रक है. सक्षम करने के बाद आपको यूआई पर बटनों को देखना होगा और इसे क्लिक करने के लिए कार्डबोर्ड पर ट्रिगर बटन को दबाना होगा. एक बार जब आप उड़ान भर रहे हों तो ट्रिगर को कहीं भी दबाने से सेटिंग पेज खुल जाएगा. आप ट्रिगर बटन दबाने के बजाय ट्रिगर इवेंट को निष्पादित करने के लिए स्क्रीन पर कहीं भी टच कर सकते हैं.
17) अधिकतम झुकाव कोण / ऑटो स्थिर संवेदनशीलता स्लाइडर
सामान्य मोड में स्लाइडर अधिकतम झुकाव कोण सेटिंग को बदल देता है। यह सेटिंग क्वाडकॉप्टर द्वारा झुकाए जाने वाले अधिकतम रोल/पिच कोण को निर्धारित करती है. स्पोर्ट्स मोड में यह ऑटो स्टेबिलाइज़ सेंसिटिविटी को बदल देता है. जितनी अधिक सेटिंग्स होंगी क्वाडकॉप्टर को स्थिर करने के लिए उतना ही अधिक बल लगाया जाएगा.
18) विशेषज्ञ उड़ान के लिए एक्रो / एक्रो 3 डी मोड
इन मोड में ऑटो स्टेबलाइज़ लागू नहीं किया जाएगा. आपको इस मोड में उड़ान भरने के लिए विशेषज्ञ होने की आवश्यकता है। 3 डी मोड में वह मोड है जिसमें क्वाडकॉप्टर उल्टा भी उड़ सकता है। केंद्र की स्थिति से नीचे ले जाने पर थ्रॉटल स्टिक रिवर्स थ्रस्ट उत्पन्न करेगी.
उड़ने का आनंद लें..
क्रेडिट: कुछ Arteria सामग्री उपयोग में है.
और दिखाएं
SIMULATION
वर्शन 1.3.5 में क्या नया है
अंतिम अपडेट Jun 09,2025 पर
छोटी-बड़ी बग सुधार और सुधार किए गए हैं। नवीनतम संस्करण को इंस्टॉल करें या अपडेट करें और इसे देखें!
कम दिखाएं
स्क्रीन शॉट्स



Information
-
अपडेट किया गया2025-06-09
-
वर्तमान वर्शन1440946614
-
संसाधन
-
Apk आकार0MB
-
Android की आवश्यकता हैAndroid 4.4+